Among the thermal control techniques for space applications the passive systems are for sure the most attractive ones. Passive systems show several advantages as no additional pumping systems, a simpler and lower maintenance, small size and a generally low cost.
One of these is the PHP (standing for Pulsating Heat Pipe), the principle “subject” of our experiment.
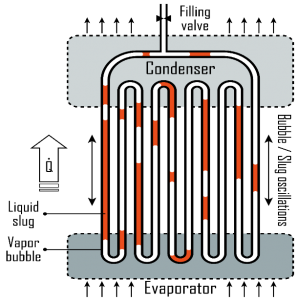
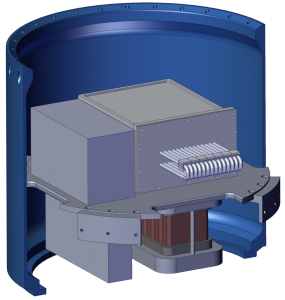
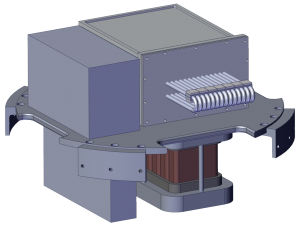
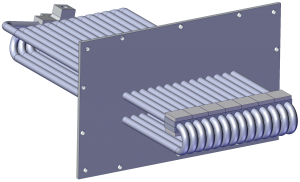
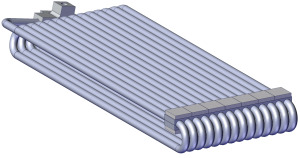
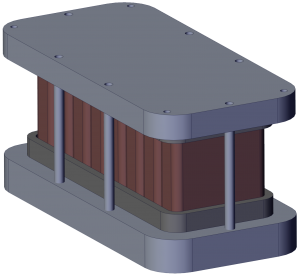
The PHP is a simple aluminum tube, folded in many turns and filled with a refrigerant fluid. The device is then closed end to end in a loop. The PHP needs to be strictly in contact with a heat sink, a paraffin wax.
A small critical diameter is required in order to obtain the desired pulsating flow regime. At ground conditions we have a critical diameter after which our device will not work. Instead In milli-gravity environment the critical diameter is bigger than that calculated on ground, so the performance of PHPs in that condition may increase. UPHOS intends to prove the increasing in performance of a PHP under milli-g condition and validate a device that could be widely used in the space field.